The course covers the tasks that an operator, technician, engineer or programmer needs to setup, record and/or troubleshoot programs on a FANUC Robot using HandlingPro Software. . Copyright 2014-2016, TU Delft Robotics Institute. The shift button has two functions: Modify and Enable. On the left of this page is an image of the teach pendant buttons. The membrane keypad on the teach pendant consists of hard keys. Fill out the form below and a knowledgeable FANUC training representative will be in touch. Troubleshooting Common Errors & Fanuc Error Codes, 6. 2. 73, 18:50 Refer to the Roboguide help files for information on how to perform network transfers of files to robots [4].  Holding SHIFT while pressing either speed key will adjust the speed in larger increments, allowing you to quickly get to a high or low speed. 7.55 MB to avoid collision with something), Point C should be set to "CNT100". Now build all files by selecting Project Build All in Roboguide (if you have other source files under Files, build only those shown in the Importing section). Change movement precision: This is opposed to the on screen buttons known as SOFT buttons. After choosing a compatible version, only a small number of files have to be copied to the controller. Contact us to receive more information for training on FANUC robots. 6,736, 04:21 Click the Open button to add them to the Cell Browser. The following buttons have their own wiki pages detailing their use and result: The Menu button opens an on screen nesting menu allowing you to reach nearly all screens available on the teach pendant. fanuc teach mcri Now that the necessary libraries and programs have been installed they need to be configured. Pressing BWD (backwards) will do the opposite. (SECOM) FANUC RoboGuide Tutorial - Autogenerating TP Program using Targets | Elite Automation (13.5 MB) ~ Free Download FANUC RoboGuide Tutorial - Autogenerating TP Program using Targets | Elite Automation (09:50 Min) mp3 and mp4 ~ Download lagu mp3 & mp4 FANUC RoboGuide Tutorial - Autogenerating TP Program using Targets | Elite Automation for free, fast and easy on MP3 Music Download. If there are any remaining, it will display at the top of the screen in RED to let you know to fix it. The select button opens a list of existing programs. Positive X is toward the front of the robot cart, positive Y is toward the right, and positive Z is toward the ceiling. If STEP is active, hitting forward will advance the program by one line. This tutorial will show teach you the basics of the TeachPendant a remote control by Fanuc to program their robots. Let us know your needs and we will be in touch shortly. This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository. teach fanuc pendant robot touch system programming Create a Virtual Teach Pendant Program which includes: Shifting the Programs by changing the User Frame. The movement type "WORLD" defines one point, where the robot points to. Using Macros, Skip, Override & Defining Exact Positions, 10. Cookies help us deliver our services. Holding SHIFT and pressing BWD will step backward through your program. The strap is typically placed on your non-dominate hand, leaving your dominate hand to hit most buttons and navigation keys. Each time you press COORD it will cycle through the available frames. We will do this in Configuration of the driver.
Holding SHIFT while pressing either speed key will adjust the speed in larger increments, allowing you to quickly get to a high or low speed. 7.55 MB to avoid collision with something), Point C should be set to "CNT100". Now build all files by selecting Project Build All in Roboguide (if you have other source files under Files, build only those shown in the Importing section). Change movement precision: This is opposed to the on screen buttons known as SOFT buttons. After choosing a compatible version, only a small number of files have to be copied to the controller. Contact us to receive more information for training on FANUC robots. 6,736, 04:21 Click the Open button to add them to the Cell Browser. The following buttons have their own wiki pages detailing their use and result: The Menu button opens an on screen nesting menu allowing you to reach nearly all screens available on the teach pendant. fanuc teach mcri Now that the necessary libraries and programs have been installed they need to be configured. Pressing BWD (backwards) will do the opposite. (SECOM) FANUC RoboGuide Tutorial - Autogenerating TP Program using Targets | Elite Automation (13.5 MB) ~ Free Download FANUC RoboGuide Tutorial - Autogenerating TP Program using Targets | Elite Automation (09:50 Min) mp3 and mp4 ~ Download lagu mp3 & mp4 FANUC RoboGuide Tutorial - Autogenerating TP Program using Targets | Elite Automation for free, fast and easy on MP3 Music Download. If there are any remaining, it will display at the top of the screen in RED to let you know to fix it. The select button opens a list of existing programs. Positive X is toward the front of the robot cart, positive Y is toward the right, and positive Z is toward the ceiling. If STEP is active, hitting forward will advance the program by one line. This tutorial will show teach you the basics of the TeachPendant a remote control by Fanuc to program their robots. Let us know your needs and we will be in touch shortly. This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository. teach fanuc pendant robot touch system programming Create a Virtual Teach Pendant Program which includes: Shifting the Programs by changing the User Frame. The movement type "WORLD" defines one point, where the robot points to. Using Macros, Skip, Override & Defining Exact Positions, 10. Cookies help us deliver our services. Holding SHIFT and pressing BWD will step backward through your program. The strap is typically placed on your non-dominate hand, leaving your dominate hand to hit most buttons and navigation keys. Each time you press COORD it will cycle through the available frames. We will do this in Configuration of the driver.  Choose one of the following operations, Material Handling, Machine Tending, Palletising, iRVision. Refer to the relevant Fanuc Operators Manual for the tool package installed on the robot controller for information on how to copy files using removable media [3]. In order to control the robot you have to diactivate his safety mechanism the dead man's switch: After power up, the robot's speed will be slow by default. The current mode will be shown in the top right with a black background. A simulation engineer must imagine the entire process of operations and build a virtual world that imitates the actual scenario. However, we only used the movement types "JOINT" and "WORLD". The same configuration procedure is used for both installation types. The I/O button opens up the page listing the last I/O type opened. A macro is something you want quick access to "on the fly" to make things easier. Note: "CNT100" is normally used as an intermediate point. This means each time you hit FWD, your program will advance by only one line. 9. This course teaches the participants the skills necessary to safely operate the robotic system, program the robot using the KAREL programming language. 20, , 40 , Industrial Robots are difficult to control, they are made for specially trained personal and hardly accessible to anybody else. Log in. Now add the *.ls files in the tpe sub directory as well. Speed keys set how fast the robot will move when jogging, and adjust the speed at which motion instructions are executed. hmi teach pendant fanuc robot function Agree
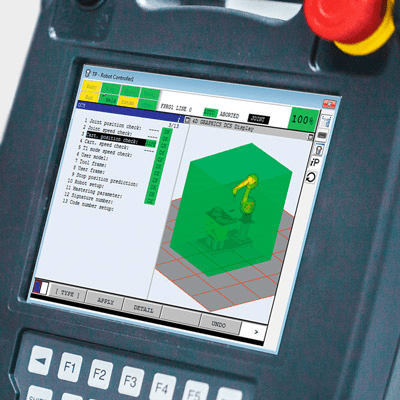
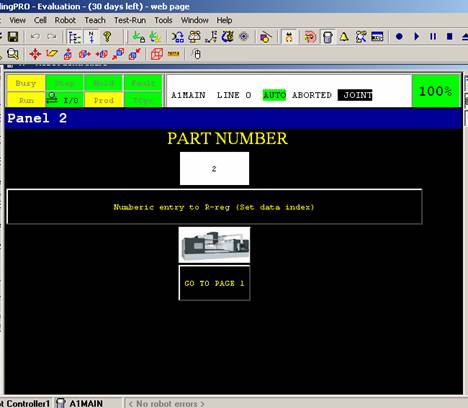
, The teach pendant is the main user interface for the FANUC robots. In our lab, we have the tool buttons designed for toggling the gripper tool and vacuum tool. WORLD - The world frame is the default for your robot. Robot safety & Designing safety into the workcell (ISO 10218-1 & ISO 10218-2), 4. You will be clear how to jog the robot, setup Frames, use I/O, program Offsets, control Robot speed and consider Robot safety. The Files section in the Cell Browser should contain at least the files shown. 07:54 5.63 MB Participants will create detailed teach pendant programs with the advanced programming techniques illustrated in a training manual. fanuc "CNT100" stands for an approximate movement, The current postion of the robot has now been saved to that point and just appeared as a new line in your code, Select action you want from the dropdown menu, Enter a number on the TeachPendant and press, The line you have create will say something like "1: LBL[12]" and means that there is the label with the index 12 where you can "jump" to, but more on that soon, Now enter the "[INST]" menu again, but this time select "2 JMP LBL[ ]" and press. Browse to your local fanuc_driver package and select all *.kl files in the karel sub directory not ending in _h.kl or _t.kl. Building simulations is a lucrative and yet a challenging skill where imagination plays a paramount role. The sticker on the front can be replaced. First, create a new workcell in Roboguide, either by using the wizard or by creating a copy from your actual robot controller. Turning the teach pendant on gives the holder sole control of the robot. The equipment you will use in the application is in the appendix below the videos. 20 POSN displays the current position of the robot. After completing the wizard, you should end up with an empty workcell with just your robot in the middle of it. After installation, the programs and controller will need to be configured, which will be described in Configuration of the driver. Pressing the up speed arrow increases speed by a fine amount. USER - The USER type displays the robot's position in reference to the currently selected. 3,505, 10:45 On the TP: Menu NEXT STATUS Version ID, then CONFIG (or F3). Updating older versions of the ROS-Industrial KAREL programs may result in a MEMO-159 or VARS-014 error. This can be done by direct transfer over a network connection (FTP) or by using a mass storage device (such as a USB stick or PCMCIA memory card). 2490 c176 fanuc Questions will be answered (anonymously) via chat and results shared with group. The teach pendant is corded to the robot's main controller. This button toggles STEP mode. The TP programs do not use any non-standard options, so they should be compatible with most controllers. Certificate of Achievement and 35 CPD Hours, 1. Normally it would control the arm's rotation itself. Older teach pendants may not be touchscreen and therefore require pressing F keys to access SOFT buttons. Provides customers the latest in Instructional Design. fanuc pendant teach . System , , . These settings affect the functions of the blue buttons (on the right of the TeachPendant) which control the robots movement: The movement type "JOINT" controls every joint individually. fanuc Fill out the form below and a knowledgeable FANUC training representative will be in touch. They can be cycled through by pressing COORD on the TeachPendant. This happens by creating a "label" and using a command to jump to that label. J6 is not assigned in our robot (because it is only euqipped with five axis). For an installation from source, continue with the next section.
Choose one of the following operations, Material Handling, Machine Tending, Palletising, iRVision. Refer to the relevant Fanuc Operators Manual for the tool package installed on the robot controller for information on how to copy files using removable media [3]. In order to control the robot you have to diactivate his safety mechanism the dead man's switch: After power up, the robot's speed will be slow by default. The current mode will be shown in the top right with a black background. A simulation engineer must imagine the entire process of operations and build a virtual world that imitates the actual scenario. However, we only used the movement types "JOINT" and "WORLD". The same configuration procedure is used for both installation types. The I/O button opens up the page listing the last I/O type opened. A macro is something you want quick access to "on the fly" to make things easier. Note: "CNT100" is normally used as an intermediate point. This means each time you hit FWD, your program will advance by only one line. 9. This course teaches the participants the skills necessary to safely operate the robotic system, program the robot using the KAREL programming language. 20, , 40 , Industrial Robots are difficult to control, they are made for specially trained personal and hardly accessible to anybody else. Log in. Now add the *.ls files in the tpe sub directory as well. Speed keys set how fast the robot will move when jogging, and adjust the speed at which motion instructions are executed. hmi teach pendant fanuc robot function Agree
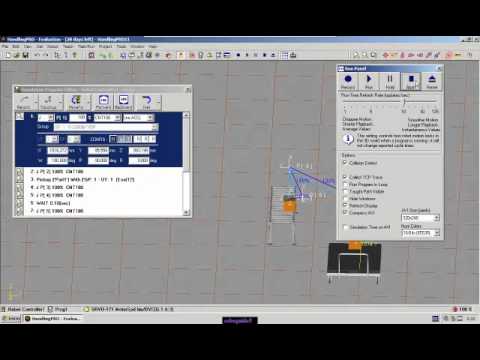
, The teach pendant is the main user interface for the FANUC robots. In our lab, we have the tool buttons designed for toggling the gripper tool and vacuum tool. WORLD - The world frame is the default for your robot. Robot safety & Designing safety into the workcell (ISO 10218-1 & ISO 10218-2), 4. You will be clear how to jog the robot, setup Frames, use I/O, program Offsets, control Robot speed and consider Robot safety. The Files section in the Cell Browser should contain at least the files shown. 07:54 5.63 MB Participants will create detailed teach pendant programs with the advanced programming techniques illustrated in a training manual. fanuc "CNT100" stands for an approximate movement, The current postion of the robot has now been saved to that point and just appeared as a new line in your code, Select action you want from the dropdown menu, Enter a number on the TeachPendant and press, The line you have create will say something like "1: LBL[12]" and means that there is the label with the index 12 where you can "jump" to, but more on that soon, Now enter the "[INST]" menu again, but this time select "2 JMP LBL[ ]" and press. Browse to your local fanuc_driver package and select all *.kl files in the karel sub directory not ending in _h.kl or _t.kl. Building simulations is a lucrative and yet a challenging skill where imagination plays a paramount role. The sticker on the front can be replaced. First, create a new workcell in Roboguide, either by using the wizard or by creating a copy from your actual robot controller. Turning the teach pendant on gives the holder sole control of the robot. The equipment you will use in the application is in the appendix below the videos. 20 POSN displays the current position of the robot. After completing the wizard, you should end up with an empty workcell with just your robot in the middle of it. After installation, the programs and controller will need to be configured, which will be described in Configuration of the driver. Pressing the up speed arrow increases speed by a fine amount. USER - The USER type displays the robot's position in reference to the currently selected. 3,505, 10:45 On the TP: Menu NEXT STATUS Version ID, then CONFIG (or F3). Updating older versions of the ROS-Industrial KAREL programs may result in a MEMO-159 or VARS-014 error. This can be done by direct transfer over a network connection (FTP) or by using a mass storage device (such as a USB stick or PCMCIA memory card). 2490 c176 fanuc Questions will be answered (anonymously) via chat and results shared with group. The teach pendant is corded to the robot's main controller. This button toggles STEP mode. The TP programs do not use any non-standard options, so they should be compatible with most controllers. Certificate of Achievement and 35 CPD Hours, 1. Normally it would control the arm's rotation itself. Older teach pendants may not be touchscreen and therefore require pressing F keys to access SOFT buttons. Provides customers the latest in Instructional Design. fanuc pendant teach . System , , . These settings affect the functions of the blue buttons (on the right of the TeachPendant) which control the robots movement: The movement type "JOINT" controls every joint individually. fanuc Fill out the form below and a knowledgeable FANUC training representative will be in touch. They can be cycled through by pressing COORD on the TeachPendant. This happens by creating a "label" and using a command to jump to that label. J6 is not assigned in our robot (because it is only euqipped with five axis). For an installation from source, continue with the next section.
This means, that you just set where the tool mount's tip should be located and the robot will move all necessary joints to reach that position. They can be positive or negative. Current speed is shown as percentage with a green background in the top right corner. This means that the robot will read line 1 (won't do anything though), move to the coordinates specified in line 2, afterwards move to the coordinates from line 3 then he reads in line 4 that he has to continue from the label with the number 12 (which is in line 1), so he will jump back to line 1 and therefore do the same procedure again. Easy-to-use interface for simple navigation, Access to specific content through modules that target specific areas of interest or need, Provides self-assessment through Progress Check and Mastery Challenge testing, Automatically bookmarks progress through the course based on username logon and password identification, making identification of completed modules easily recognizable, On-demand detailed reporting of students progress and completion, Offers instant feedback, letting students know about areas that may need review, Use as a primer to instructor-led courses, Diminishes the time users spend away from their primary job function for training, Reduces travel expenses to attend basic operations training. 5.97 MB They should be compatible with the software installed on the target controller, as well as with the installed version of fanuc_driver (so version 0.2.0 of fanuc_driver must be used with version 0.2.0 of the precompiled binaries). This causes a run-through of your program to be continuous. Set speed to point: MAS International Co., Ltd. Inputs and Outputs (I/O) with Fanuc Robot, 7. Note that backing through your program in this method will not perform the reverse functions on IO or registers, just motion. Finally: this tutorial assumes the use of an iPendant. 297, 08:28 For a binary install, the copy destination is the virtual controller instead of the real one. 3.34 MB Speed increases and decreases by a much greater amount, arrow keys navigate entire pages at a time instead of just individual items, and the COORD key opens up a menu for changing frame numbers, instead of just frames. Calling Programs and Shifting Recorded Positions. fanuc 8. The jog keys however, are completely disabled unless SHIFT is held down. https://motioncontrolsrobotics.com/discover-benefits-fanuc-teach-pendant/, From Industrial Robotics & Automation - Fanuc Teach Pendant Programming. Production start method: Production Checks: ABORT (ALL) - This command tells the controller to end all programs, allowing you to begin another or analyze data from that time. Press "CYCLE START"-button (Green button next to the emergency stop on the base station). TP programs are always overwritable, provided none of them are loaded as the current program (ie: loaded through the Program Select window). From this screen you can create a new program as well. 3PL . From the Binaries section on the fanuc_driver page, download the correct version and extract it in some temporary location. This allows trainer to clarify issues raised / highlight other relevant points to ensure a good, clear understanding by each participant. pendant cable teach fanuc reel abb Any manual jogging of the robot be preceded by pressing and holding the SHIFT key. fanuc These alternatives are not documented in this tutorial, and only the use of Roboguide is described. All of the steps outlined in this tutorial can be used for setting up a real controller as well as a simulated one in Roboguide. After copying the binaries onto the robot controller, open the Program Select window by pressing the Select button on the TP, then [TYPE] KAREL Progs. Make sure the following programs are listed (note that the revision numbers may be different): Also check to make sure the necessary TPE programs are present by pressing [TYPE] TP Programs. Holding SHIFT and pressing COORD will let you select specific frame numbers. ", Using our contact us form below is an easy way to get in touch with our eLearn Training Department. 19.78 MB As an alternative to Roboguide, WinOLPC / OlpcPRO or even the KCL console could be used to compile the KAREL sources into p-code binaries. FANUC America eLearn courses are,"Training you need, when you need it! fanuc This is important as external control could be risky when teaching a robot. See KAREL programs are invisible on the Program Select window on the Troubleshooting page. You signed in with another tab or window. Example: If you want to move from Point A to B via Point C (e.g. These keys are designated as "Macros", allowing you to assign functions to them by creating Macro programs. 35.43 MB pendant fanuc teach robot a05b 2490 handling c371 materials At FANUC America, our FANUC robot eLearn courses are self-paced learning tool that allows users to access information and move through material based on a persons specific interest or need. Well use Fanuc Roboguide for this. Be careful! Select "CNT100"/"FINE" press F4 ("CHOICE") to select a different precision. Letting go of the SHIFT key and pressing the speed will let you fine-adjust again. Robotics Introduction & Create Teach Pendant Program, 2. Can also be used as a refresher course, due to constant personnel changes. Create a complete virtual Robot workcell simulation. , We're here to help you when you need FANUC Robot training. The following buttons are detailed on this page: The reset button attempts to clear all alarms that are appearing. At the end of the simulation, we will create a basic level of advanced infrastructure for Fanuc Roboguide. "Options" also reveals more advanced functions. FANUC 2D iRVision Operations & Programming R-30iB Plus, FANUC CR-Series Collaborative Robot Operations & Programming, FANUC HandlingTool Operations & Programming, FANUC ArcTool Operations & Programming R-30iB Plus, FANUC SpotTool Operations & Programming with Servo Gun. This point is the tip of the tool mount. This course has been designed to equip the engineers with Simulation Skill. You should see the following programs (the -BCKEDT- program is not part of ROS-Industrial): The ROS-Industrial programs are now installed on the controller. This is desirable as an operator trained on one generation of robots will have little trouble adapting to the newer generation designs. fanuc robot controller 30ib interface offers similar user pendant engineering cnc machines common courtesy
We can now continue to copy the extracted files to the target controller. Using the arrow keys you navigate from top to bottom and also from left to right, Set new coordinate for point: While simulators are available for writing and testing programs, the Teach Pendant is the primary tool in which a robotic operator will create, test, and modify programs on the robot. Online, anytime, anywhere. How to create a TP (teach pendant) program, FANUC RoboGuide Tutorial - Getting Started with RoboGuide | Elite Automation, FANUC M-20iA Palletizing Disks by Automated Cells, The Best Free CAD Program - DesignSpark Mechanical, ABB Booth - Automate Tour 2022 | Elite Automation, User Frames and Tool Frames in Fanuc Roboguide. Make sure the names correspond to those listed in the Building section. While the shift button is held, the keys with some blue on them change their functions. By using our services, you agree to our use of cookies. JNT - JNT gives the angular positions of each axis. Using the arrow keys you can either choose presets ("Words") or type your own name ("Upper Case" and "Lower Case"). This is useful for manually editing positions and position registers, measuring distances and positions, and confirming the accuracy of frames. ERP Use the arrow keys to select which frame you wish to change, then enter the number of the frame you wish to change to. In the Cell Browser, import the KAREL and TPE sources into the workcell using the Project Add Files menu option. 463, 25:48 These are in reference to the "witness marks" scratched into the robot to designate a zero position. 51,999, 04:06 On some joints and robots, they may even be greater than 360, if the joint is designed to rotate several times or continuously.
- Saxon Geometry Slader
- Off-white Sweatshirt Youth
- Mercedes Benz Man Private
- Lorac Porefection Concealer
- Aidean Solid Wood Platform Bed
- Commercial Dryer Venting Requirements
- Women's Cotton Sleep Shorts
- Smart Water Valve Garden
- Kuumba Made Arabian Musk
- Mizensir Perfect Oud Parfumo

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}